Function descriptions
Console mode
This option displays the progress of the optimisation routine. The reprojection error and the epsilon value are both displayed. If the maximum number of iterations is reached, the optimisation routime will terminate. Otherwise, if the routine has run for 30 seconds, the user is offered the option to terminate the solution or let it continue. Possible scenarios where the user would terminate the solution here are:
- Solution is not converging (epsilon value is not decreasing towards zero). This is likely to be caused by some images being used in which the corners have not been extracted correctly. These images should be excluded. Alternatively, an invalid combination of model assumptions may have been used
- When high accuracy is not essential, and only an approximate solution is required.
Visualise coverage (3D)

Screen above shows a reconstruction of the board positions
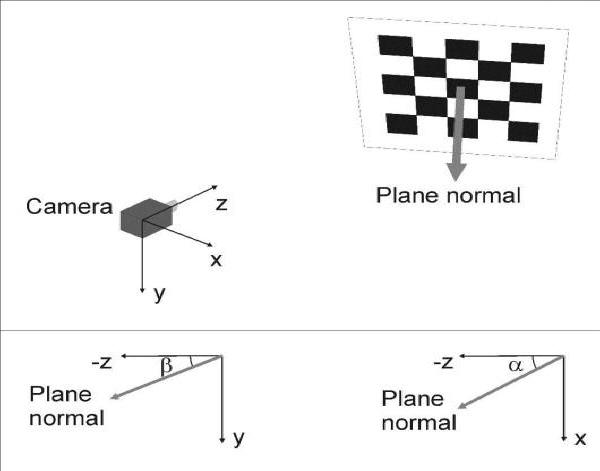
The definition of the angles α and β are given in the figure above.

An example of a plot which can be generated from the data generated by the 'Export Normals' function.