
Overview
Check3D is a software package that has been developed by the Centre for Sports Engineering Research at Sheffield Hallam University. It uses the planar camera calibration technique from the OpenCV function library.
The software allows the user to:
- Calibrate the intrinsic parameters of the camera
- Calibrate the extrinsic parameters of the camera pair
- Define a local origin system using a planar object
- Digitise test footage using different marker size/shape and calculate the 3D position of the marker
An overview of each stage is given below:
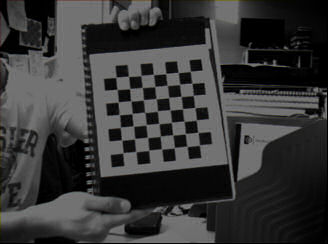
Create a checkerboard calibration object
The calibration object needs to satisfy the following criteria:
- Be flat
- Have equal number of squares in the horizontal and vertical directions
- Have either a large white or black border around the checkerboard pattern

Calibrate the intrinsic parameters of the camera
- Mark out the required control volume to make sure the correct area is calibrated.
- Move checkerboard around control volume at various angles and record still images using both cameras.
- Create New Calibration in Check3D software using the collected images.
- Check3D software detects the intersections between the black and white squares which are used by the algorithm to create the intrinsic camera model.
- Invalid images are excluded from the calibration.
Calibrate the extrinsic parameters of the camera
- At this stage of the calibration it must be ensured that the images in both cameras correspond to each other (i.e. frame 6 in the left camera must correspond to frame 6 in the right camera).
- The calibration algorithm finds the optimal relative position of the two cameras.
- Once the calibration is complete, Check3D offers the facility to specify the Local Origin System. This is done by digitising the location of the local origin, X-axis and Y-axis. The Z-axis is assumed to act mutually perpendicular to the X-axis and Y-axis, complying with the right hand convention.
Digitise markers in the trial footage
- Corresponding markers in both camera views are digitised and then reconstructed into 3D coordinates within Check3D.
- This data can be exported to the clipboard or to a .csv file.